AMBER学院
梯形运动轨迹
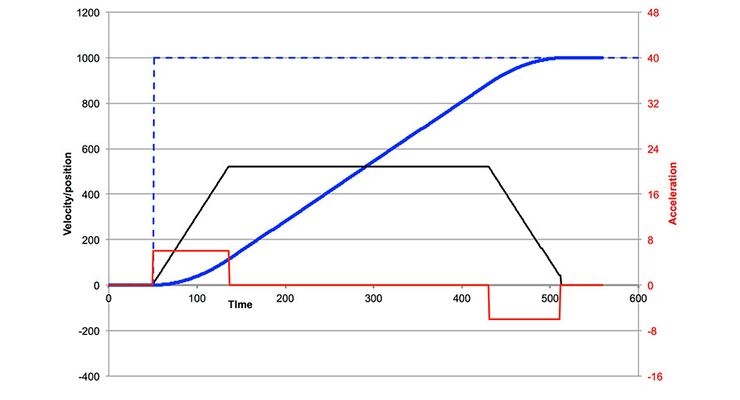
控制运动时,平滑的从一个位置移动到另一个位置运动很重要。
例如,假设您有一个机械臂捡起了一个物体,需要将其从桌子的一侧移到另一侧。此动作需要花费几秒钟才能执行。更好的方法是找到许多中间关节角,这些中间关节角可以平滑地移动到目标位置,并逐渐加速和减速,而不是立即命令将手臂末端执行器移动到新位置的目标关节角度。这就是梯形运动轨迹可以帮助您完成的任务。
在梯形运动轨迹中,三个变量定义了整个运动过程,加速度,减速度和速度限制。
PID控制器
电机控制器为级联式位置,速度和电流控制环路,如下图所示。当控制模式设置为位置控制时,运行在整个环路上。在速度控制模式下运行时,将位置控制部分旁路,并将速度命令直接输入到第二级输入中。在电流控制模式下,仅使用电流控制器。
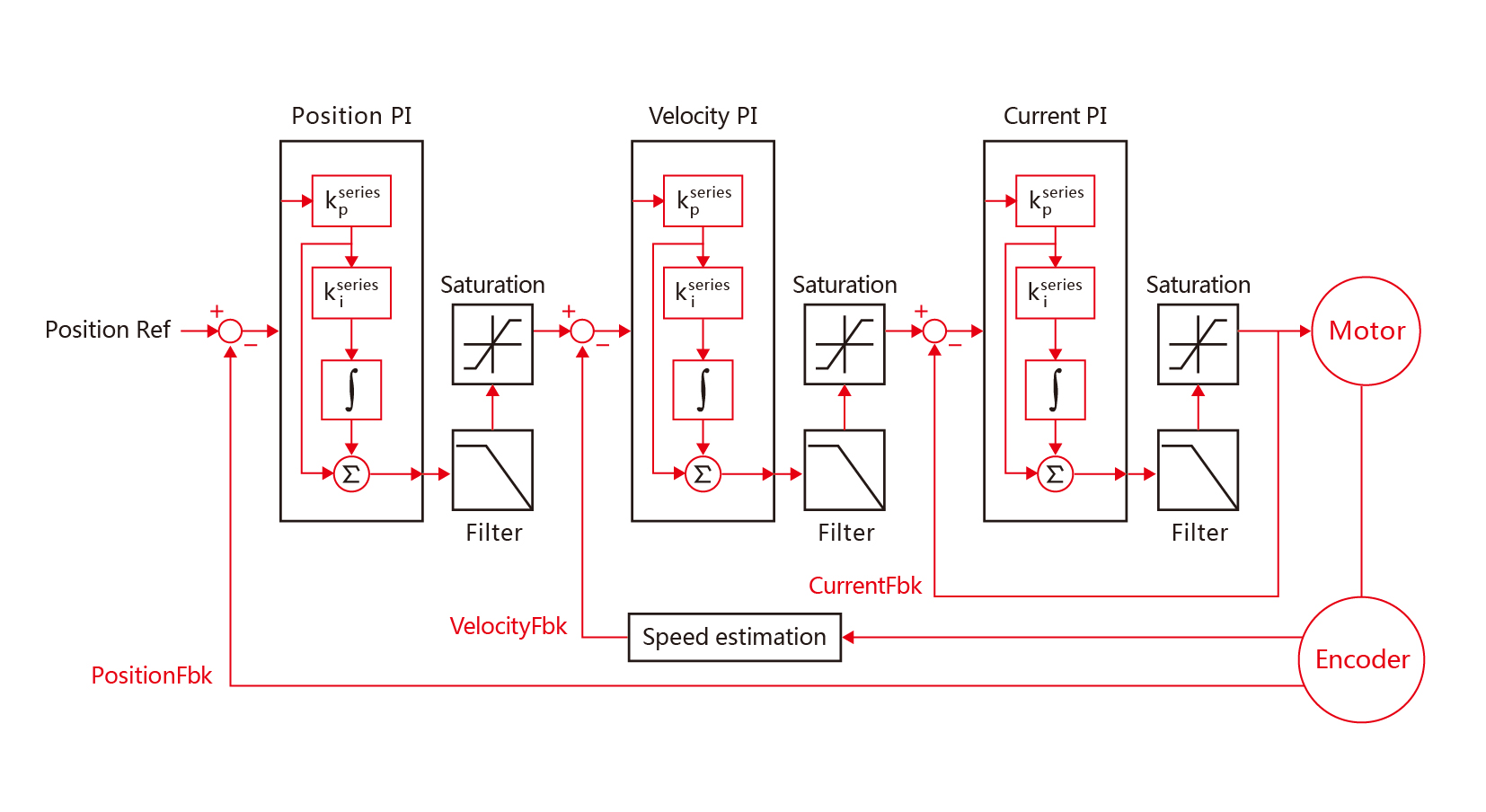
控制回路的每个阶段都是PID控制器的一种变体。PID控制器是一种数学模型,可以适用于控制各种系统。这种灵活性至关重要,因为它允许AIOS用于控制各种机械系统。
位置环:
位置控制器是一个具有单个比例增益的P环路。
pos_error = pos_setpoint - pos_feedback
vel_cmd = pos_error * pos_gain + vel_feedforward
速度环:
速度控制器是一个PI环路。
vel_error = vel_cmd - vel_feedback
current_integral += vel_error * vel_integrator_gain
current_cmd = vel_error * vel_gain + current_integral + current_feedforward
电流环:
电流控制器是一个PI环路。
current_error = current_cmd - current_fb
voltage_integral += current_error * current_integrator_gain
voltage_cmd = current_error * current_gain + voltage_integral